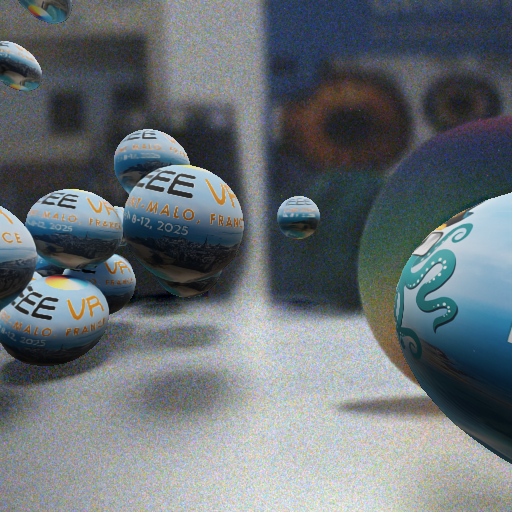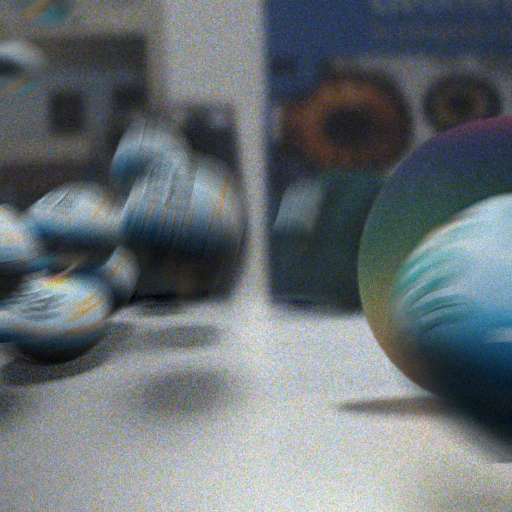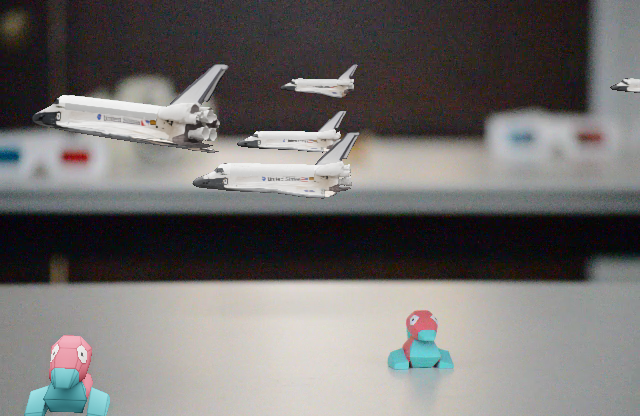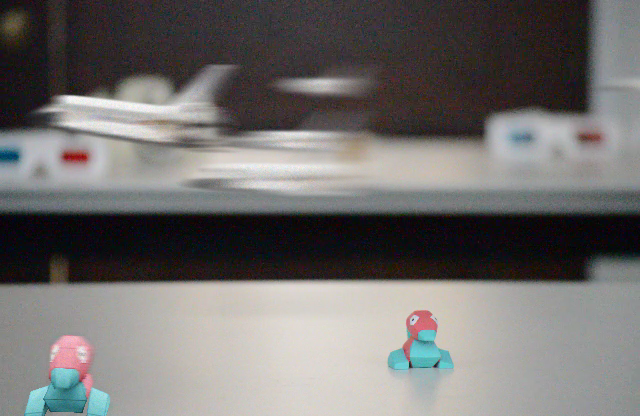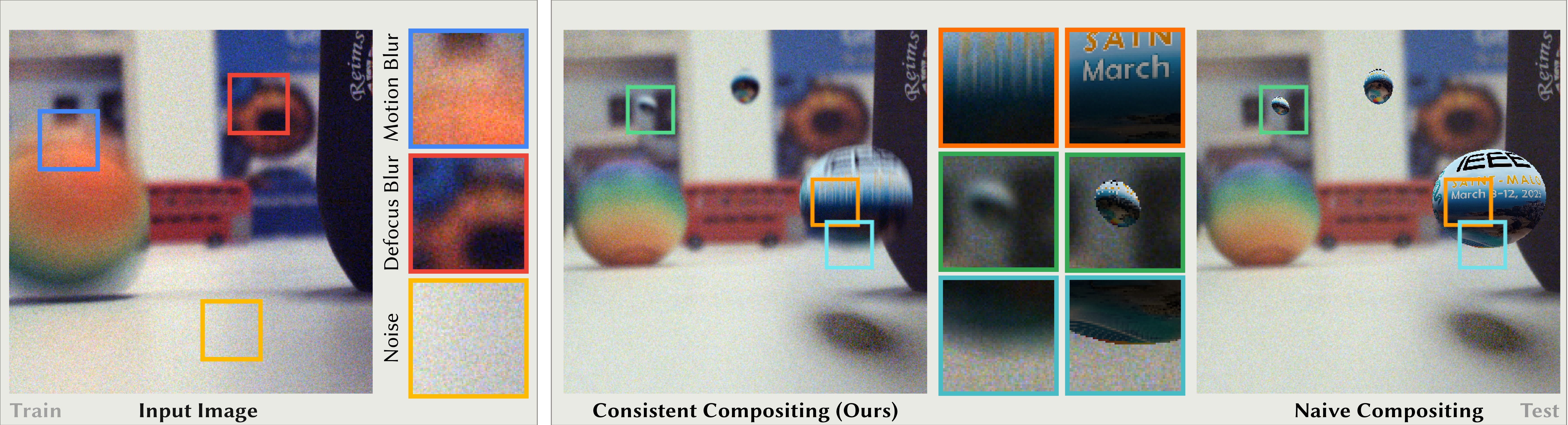
Consistent Compositing (Ours) vs Naive Compositing
Naive Compositing
Consistent Compositing (Ours)